Publié le 14 octobre 2022
Les capteurs NOMADe sont validés
L’utilisation de capteurs inertiels (IMU) peut fournir des données de mouvement embarquées pour améliorer l’application clinique. L’objectif de cette étude était de valider le système IMU nouvellement conçu par l’équipe NOMADe. La validation est assurée par deux méthodes principales :
- une validation classique des capteurs réalisée sur une plateforme hexapode à six degrés de liberté avec des mouvements linéaires et de rotation contrôlés
- une validation fonctionnelle sur des sujets effectuant des accroupissements avec mesure de l’angle segmentaire.
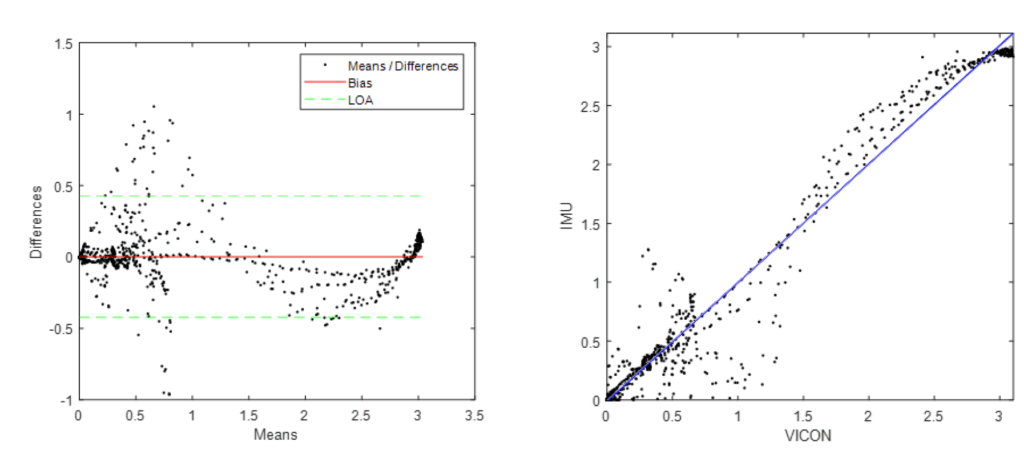
La trajectoire tridimensionnelle des capteurs a été mesurée à l’aide d’un système de référence optoélectronique (VICON), puis comparée à l’orientation et aux données brutes des IMU. Des graphiques de Bland-Altman et le coefficient de corrélation de concordance de Lin ont été calculés pour évaluer les erreurs des paramètres cinématiques entre les IMU et le système VICON. Les résultats ont montré une précision satisfaisante du système NOMADe pour les mouvements linéaires, de rotation et d’accroupissement.