Gepubliceerd op 16 december 2021
Elektromyografie
eerste prototype!
Een goedkope sensor voor het meten van spieractiviteit is nu functioneel: de eerste resultaten worden in deze poster samengevat.
Context
The INTERREG FWVL NOMADe project aims to develop a cross-border ecosystem of learning, R&D and expertise specialized in the field of neuro-musculo-skeletal disorders. The validation of a low-cost, low-complexity, and open-source surface electromyography
(sEMG) sensor is part of the project.
Surface electromyography is the most widespread method to measure muscular activity through the variations of tension induced by muscular contractions. However, most of professional sEMG sensors are unaffordable for average therapists. In 2021, a low-cost (around €100) sEMG has been designed by the DRAMCO group at KULeuven. The first results of a validation procedure are presented here.
Objectives
- Identify external factors responsible for extra noise in the NOMADe sEMG.
- Compare the NOMADe sEMG signal with that of a gold-standard system (Delsys Trigno Avanti sEMG, sampling frequency 2048 Hz) in isometric contractions as well as in simple movements of the upper and lower limb.
The NOMADe sEMG signal
The NOMADe sEMG raw signal (sampling frequency 2000 Hz) was processed using a Matlab script. A typical trace of a maximal voluntary contraction (MVC) of the right biceps brachii is shown in Fig. 2.
It can be concluded from Fig. 3 that the SNR is significantly decreased by ambient light and that the ground electrode is needed. Shielding of the prototype against the 50 Hz ambient noise must be improved.
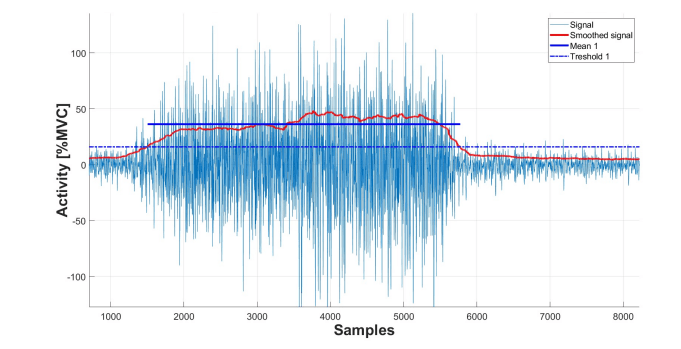
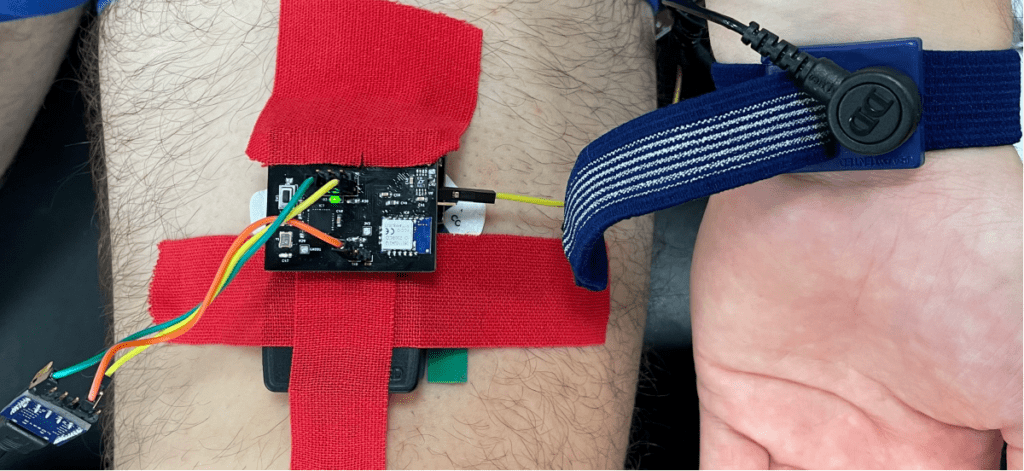
Fig.2. Raw NOMADe sEMG signal of the right biceps brachii while holding a 4 kg mass (blue lines). The signal is normalized to the muscle’s maximal voluntary contraction (MVC). The RMS signal is shown in red. Mean is the averaged RMS signal during contraction. Threshold is the averaged RMS signal + 1 standard deviation without contraction (noise).
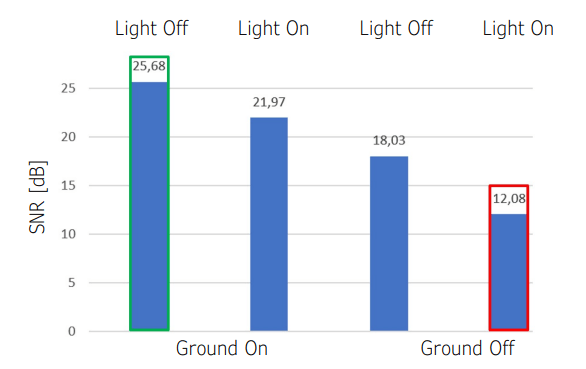
Fig.3. SNR for a MVC of the left biceps brachii with ambient light on/off and ground electrode on/off.
Delsys / NOMADe comparison
In both sensors, the left biceps brachii activity increases linearly with the mass while holding it in isometric contraction. Slopes differ by less than 4%. Results are displayed in Fig. 4.
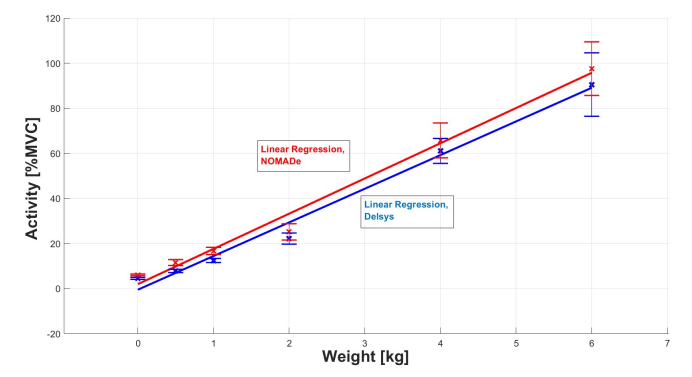
Fig.4. Left biceps brachii activity versus mass held in isometric contraction, measured with the NOMADe (red) and Delsys (blue) sEMG sensors. The activity is defined as the mean value of the RMS signal during contraction. Standard deviation of the RMS signal during contraction is also displayed (error bars).
Concluding comments
OMADe and Delsys sEMG signals are compatible in isometric contractions. In dynamical tasks as walking, both sensors give similar results but a loss of samples has been detected in the NOMADe sEMG. The next improvements will be:
- To make the sensor wireless (BlueTooth), which may solve the
loss of samples; - To design a case to shield the sensor
Acknowledgements
With the financial support of the European Regional Development Fund (Interreg FWVl NOMADe N° 4.7.360). We thank F. Piccinin for her help during the measurement sessions.