Gepubliceerd op 14 oktober 2022
NOMADe sensoren zijn gevalideerd
Het gebruik van inertiële sensoren (IMU) kan bewegingsgegevens aan boord opleveren om de klinische toepassing te verbeteren. Het doel van deze studie was het nieuw ontworpen IMU-systeem door het NOMADe-team te valideren. De validatie wordt uitgevoerd volgens twee belangrijke methoden:
- een klassieke sensorvalidatie uitgevoerd op een zes graden vrij hexapod-platform met gecontroleerde lineaire en rotatiebewegingen
- een functionele validatie op proefpersonen die squats uitvoeren met meting van de segmentale hoek.
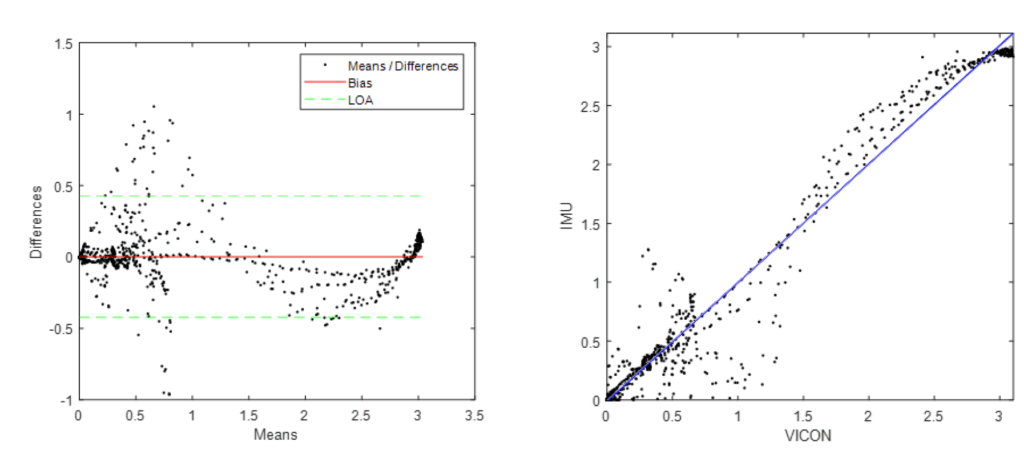
De driedimensionale baan van de sensoren werd gemeten met een opto-elektronisch referentiesysteem (VICON) en vergeleken met de oriëntatie en de ruwe gegevens van de IMU’s. Om de fouten in de kinematische parameters tussen de IMU’s en het VICON-systeem te beoordelen zijn Bland-Altman-plots en Lin’s concordantiecorrelatiecoëfficiënt berekend. Uit de resultaten bleek dat het NOMADe-systeem voldoende nauwkeurig is voor lineaire, roterende en hurkbewegingen.